智能小車驅(qū)動器軟件與人工智能基礎(chǔ)軟件開發(fā)全攻略
開發(fā)智能小車的驅(qū)動器軟件并融合人工智能基礎(chǔ)功能,是一個從硬件交互到智能決策的綜合性工程。它既是嵌入式系統(tǒng)開發(fā)的經(jīng)典實踐,也是探索人工智能落地的絕佳起點(diǎn)。本文將系統(tǒng)性地闡述其開發(fā)流程、關(guān)鍵技術(shù)以及如何引入AI能力。
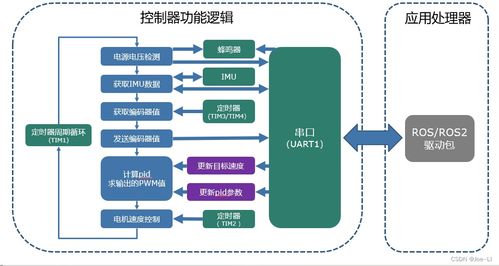
第一部分:智能小車驅(qū)動器軟件開發(fā)
驅(qū)動器軟件是智能小車的“神經(jīng)系統(tǒng)”,負(fù)責(zé)與底層硬件(電機(jī)、傳感器)直接對話,實現(xiàn)精準(zhǔn)控制。
- 硬件抽象與驅(qū)動層:
- 電機(jī)控制:這是核心。首先需要編寫電機(jī)驅(qū)動器(如L298N、TB6612等芯片)的驅(qū)動代碼。通常使用微控制器(如STM32、Arduino或樹莓派)的PWM(脈寬調(diào)制)模塊來控制電機(jī)的速度和方向。代碼需要提供如
Motor<em>SetSpeed(motor</em>id, speed, direction)等基礎(chǔ)接口。
- 傳感器集成:為各類傳感器編寫驅(qū)動。例如:
- 超聲波/紅外測距:提供
GetDistance()函數(shù)。
- 編碼器:提供
GetEncoderCount()以測量輪子實際轉(zhuǎn)速,實現(xiàn)閉環(huán)控制。
- IMU(慣性測量單元):提供姿態(tài)角(偏航角、俯仰角)數(shù)據(jù)。
- 通信接口:實現(xiàn)UART、I2C、SPI等總線通信協(xié)議,確保與傳感器和控制器的穩(wěn)定數(shù)據(jù)交換。
- 運(yùn)動控制層:
- 在驅(qū)動層之上,構(gòu)建更高級的運(yùn)動模型。例如,建立小車的運(yùn)動學(xué)模型,將抽象指令(如“以速度V前進(jìn)”、“旋轉(zhuǎn)角度θ”)轉(zhuǎn)換為左右輪的目標(biāo)速度。
- 實現(xiàn)閉環(huán)控制算法(如PID控制器),根據(jù)編碼器反饋的實際速度動態(tài)調(diào)整PWM占空比,使小車能抵抗負(fù)載變化,實現(xiàn)勻速、精準(zhǔn)的直線行駛和轉(zhuǎn)彎。
- 中間件與協(xié)議層:
- 為了與上層(如AI決策模塊)通信,需要定義清晰的通信協(xié)議(如基于串口的自定義協(xié)議,或更高級的ROS話題/服務(wù))。
- 這一層將底層的硬件細(xì)節(jié)封裝起來,向上提供統(tǒng)一的API,例如
move<em>forward(distance),rotate(angle),get</em>sensor_data()等。
第二部分:人工智能基礎(chǔ)軟件的引入與集成
在穩(wěn)定的驅(qū)動器軟件基礎(chǔ)上,我們可以為小車注入“智能”。
- 環(huán)境感知與數(shù)據(jù)融合:
- 這是AI應(yīng)用的數(shù)據(jù)基礎(chǔ)。將來自多路傳感器(超聲波、紅外、攝像頭、激光雷達(dá)等)的原始數(shù)據(jù)進(jìn)行融合處理。
- 例如,使用卡爾曼濾波或互補(bǔ)濾波融合IMU和編碼器數(shù)據(jù),得到更精確的位置和姿態(tài)估計(即狀態(tài)估計)。
- 如果使用攝像頭,則需要運(yùn)行輕量級的計算機(jī)視覺算法(如OpenCV)進(jìn)行車道線識別、交通標(biāo)志檢測或目標(biāo)跟蹤。
- 決策與規(guī)劃算法:
- 基于規(guī)則的決策:最簡單的AI,例如“遇到障礙物距離小于30cm則右轉(zhuǎn)”。
- 路徑規(guī)劃算法:實現(xiàn)如A*、Dijkstra等全局規(guī)劃算法,或動態(tài)窗口法(DWA)、時間彈性帶(TEB)等局部避障與軌跡規(guī)劃算法,讓小車能自主規(guī)劃從A點(diǎn)到B點(diǎn)的安全路徑。
- 機(jī)器學(xué)習(xí)/深度學(xué)習(xí)模型的部署與推理:
- 模型訓(xùn)練:在PC端,使用PyTorch、TensorFlow等框架訓(xùn)練AI模型。例如:
- 訓(xùn)練一個卷積神經(jīng)網(wǎng)絡(luò)(CNN)進(jìn)行圖像分類或目標(biāo)檢測,讓小車識別特定物體。
- 訓(xùn)練一個強(qiáng)化學(xué)習(xí)(RL)模型(如DQN、PPO),讓小車通過試錯學(xué)會避障、尋路等復(fù)雜技能。
- 模型輕量化與部署:將訓(xùn)練好的模型進(jìn)行量化、剪枝,轉(zhuǎn)換為適合嵌入式設(shè)備(如樹莓派、Jetson Nano)運(yùn)行的格式(如TFLite, ONNX Runtime,或使用NCNN、MNN等推理框架)。
- 邊緣推理:在車載計算單元上運(yùn)行優(yōu)化后的模型,根據(jù)實時傳感器輸入(如圖像)產(chǎn)生控制指令(如方向盤轉(zhuǎn)角、油門值),并下發(fā)給驅(qū)動器軟件執(zhí)行。
- 軟件架構(gòu)設(shè)計:
- 推薦采用模塊化和分層設(shè)計。一個典型的架構(gòu)是:
- 硬件驅(qū)動層(直接控制硬件)
- 運(yùn)動控制層(PID控制,運(yùn)動學(xué)解算)
- 感知融合層(傳感器數(shù)據(jù)處理與融合)
- AI決策層(規(guī)劃算法、模型推理)
- 人機(jī)交互/通信層(接收遙控指令或向上位機(jī)發(fā)送數(shù)據(jù))
- 考慮使用機(jī)器人操作系統(tǒng)(ROS/ROS2)作為框架。ROS提供了節(jié)點(diǎn)通信、消息傳遞、工具包等強(qiáng)大支持,能極大簡化傳感器驅(qū)動、算法模塊的集成與調(diào)試過程。
第三部分:開發(fā)流程與建議
- 迭代開發(fā):先讓小車“動起來”(基礎(chǔ)驅(qū)動),再讓它“走直線”(閉環(huán)控制),然后“感知環(huán)境”(傳感器融合),最后“自主決策”(AI算法)。
- 仿真優(yōu)先:在將復(fù)雜AI算法部署到實物前,使用Gazebo、CoppeliaSim等仿真環(huán)境與ROS結(jié)合進(jìn)行大量測試,可以大幅提高效率、降低成本并保證安全。
- 資源考量:嵌入式資源有限,需在算法復(fù)雜度、實時性與功耗之間取得平衡。AI模型的選擇和優(yōu)化至關(guān)重要。
- 安全與容錯:必須設(shè)計軟件看門狗、緊急停止機(jī)制和故障診斷功能,防止AI決策錯誤導(dǎo)致硬件損壞或安全事故。
###
開發(fā)智能小車的驅(qū)動器軟件與AI系統(tǒng),是一個融合了嵌入式開發(fā)、自動控制、傳感器技術(shù)和人工智能的跨學(xué)科項目。從精準(zhǔn)的底層PWM控制到高層的深度神經(jīng)網(wǎng)絡(luò)推理,每一層都環(huán)環(huán)相扣。遵循從下至上、由實到虛、仿真驗證的開發(fā)路徑,并善用ROS等成熟框架,你將能成功打造出一臺真正“智能”的移動機(jī)器人,并在此過程中深刻理解人工智能在物理世界落地的完整鏈條。
如若轉(zhuǎn)載,請注明出處:http://m.dhgjsj.com.cn/product/60.html
更新時間:2026-03-01 01:45:20